|
/*
* Project Name : ledLightShow
* File Name : ledLightShow.c
* Object : This example shows how to use Sensory's FluentChip libraries,
to train VRStamp to learn 4 keywords from a speaker,
and then to recognize them when they are spoken again from the same speaker
To be used with mikroElektronika Easy-VRStamp development board.
* Author : Bruno Gavand brunog@micro-examples.com
* see more details on http://www.micro-examples.com/
* Date : May 13, 2007
* Release : V1.0
* IDE : mikroE RSC4X mikroC compiler V2
* Guaranty : None, use it at your own risks
*
* MCU settings : RSC4128, 14.32 Mhz, 0 wait state
* Memory model : small
*
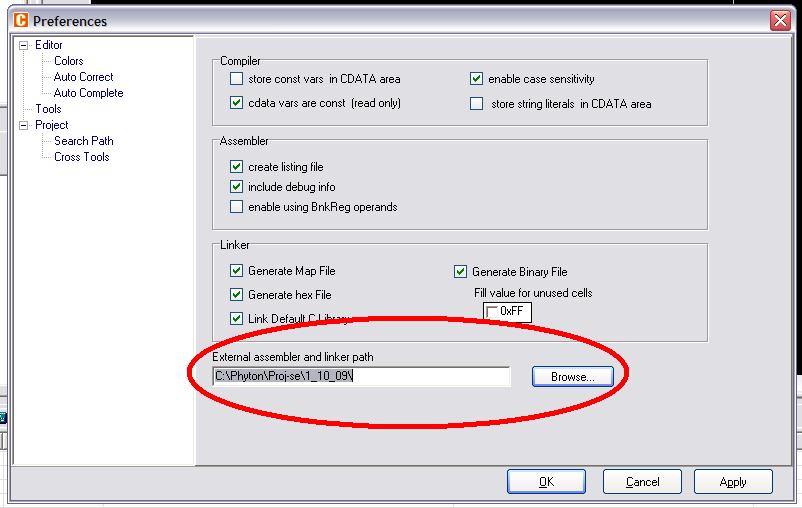
* Extra tools : Phyton assembler and linker Project SE V1.10.06
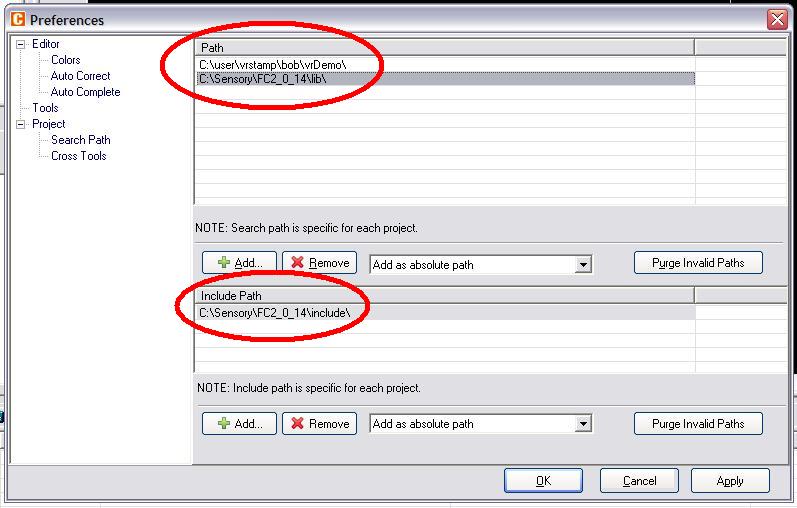
* Sensory's FluentChip library V2.0.14
*
* Dev. Board : mikroElektronika Easy-VRStamp V1.21
*
* Easy-VRStamp settings :
*
* J1, Power : USB or EXT
* J2, Buttons : to GND
* J3, P0 : no resistor
* J4, P1 : no resistor
* J5, P2 : no resistor
* J6, DAC/PWM : DAC
* J7, ADC/PWM : DAC
* J8, Mic Gain : MEDIUM
* J9, Mic : On-Board
* J10, Mic : On-Board
* SW1.0, P0 LEDs : OFF
* SW1.1, P1 LEDs : ON
* SW1.2, P2 LEDs : ON
* SW1.3 : NC
* SW1.4, P0.0 RX : OFF
* SW1.5, P0.1 TX : OFF
* SW1.6, P0.2 SDA : OFF
* SW1.7, P0.7 SCL : OFF
* SW2.0 to SW2.7 : OFF
* CN1, Ext Power :
* CN2, USB :
* CN3, RS232 : NC
* CN4, Speaker out : to On-Board Speaker
* CN5, LCD : NC
* CN6, CF MEM CARD : NC
* CN7, Ext. Mic : NC
* CN10, PORT0 : NC
* CN11, PORT1 : NC
* CN12, PORT2 : NC
*
* Instruction for use :
This programm will allow a user to control a LED light show by voice, after a learning phase.
The user will have to train the system with four keywords :
- the first keyword will start the animation
- the second keyword will slow the animation
- the third keyword will speed the animation
- the fourth keyword will exit the animation
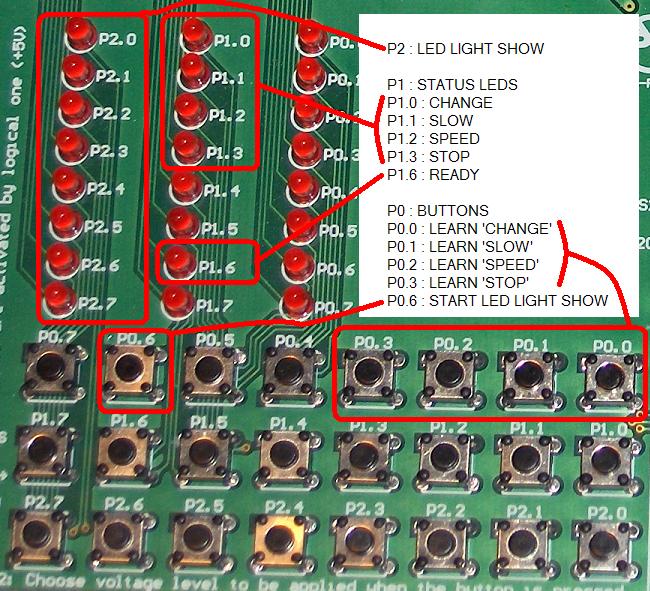
Buttons :
P0.0 : start keyword 1 training (start animation, for example : "Start !")
P0.1 : start keyword 2 training (slow animation, for example : "Slow !")
P0.2 : start keyword 3 training (fast animation, for example : "Fast !")
P0.3 : start keyword 4 training (exit animation, for example : "Exit !")
P0.6 : enters recognition mode and starts LED light show
LEDs:
P1.0 : on if keyword 1 is trained, off otherwise, blinks during training
P1.1 : on if keyword 2 is trained, off otherwise, blinks during training
P1.2 : on if keyword 3 is trained, off otherwise, blinks during training
P1.3 : on if keyword 4 is trained, off otherwise, blinks during training
P1.6 : on when system is fully trained, off otherwise, blinks during recognition mode
P2 : LED light show
After power-up :
train a keyword by pressing the corresponding button, then :
- say the keyword after the prompt beep
- repeat the same keyword after the prompt beep
when all keywords have been trained (P1.0 to P1.3 LEDs ON), press P0.6 to enter recognition mode.
when keyword 4 (exit animation) is recognized, the program exit recognition mode.
*
*/
#include "string.h"
/*
* FluentChip library definitions
*/
#include
/*
* QS4 Files
*/
#include "qs4/ledLightShow.h"
/**********************************
* MACRO DEFINITIONS AND CONSTANTS
**********************************/
/*
* I/O definitions
*/
#define BUTTON_PORT (p0in & BUTTON_MASK) // buttons
#define STATUS_PORT p1out // status PORT
#define SHOW_PORT p2out // light show PORT
/*
* Button masks
*/
#define BUTTON_MASK 0b01101111 // button port bit mask
#define BUTTON_LEARN_CHANGE (0b11111110 & BUTTON_MASK) // learn keyword for change
#define BUTTON_LEARN_SLOW (0b11111101 & BUTTON_MASK) // learn keyword for slow
#define BUTTON_LEARN_FAST (0b11111011 & BUTTON_MASK) // learn keyword for fast
#define BUTTON_LEARN_STOP (0b11110111 & BUTTON_MASK) // learn keyword for stop
#define BUTTON_RECOGNIZE (0b10111111 & BUTTON_MASK) // start recognition
/*
* TIMER 3 control definitions
* see RSC4128 datasheet for details on tmr3 control register
*/
#define T3_IRQ 0x10 // IRQ flag
/*
* other definitions
*/
#define NB_CMD 4 // number of commands
#define NB_LEDS 8 // number of status LEDs
#define STATUS_LED 6 // status led number
#define MAX_RETRY 3 // abort training after 3 mismatchs
#define SHORT_TIMEOUT 5 // listening timeout during learning phase
#define LONG_TIMEOUT 20 // listening timeout during recognition
#define BASE_TMPLT (long)sizeof(CONF_STRUCT) // template offset, leave place for configuration structure in EEPROM
#define MAX_SPEED 8
/*************************************
* LOCAL FUNCTION PROTOTYPES
*************************************/
void learnWord(char s) ;
void recognizeWord(void);
/*************************************
* VARIABLE DEFINITIONS
*************************************/
long firstTmplt ; // offset of first voice template in memory
/*
* LED animation
*/
uchar shiftLed = 0 ; // animation enable flag
uchar ledCtr ; // pattern index
uchar speedCtr = 0 ; // speed prescaler
const uchar ledAnim[5][64] = // LED patterns
{
{ 1, 2, 4, 8, 16, 32, 64, 128, 64, 32, 16, 8, 4, 2, 0 },
{ ~1, ~2, ~4, ~8, ~16, ~32, ~64, ~128, ~64, ~32, ~16, ~8, ~4, ~2, 0 },
{ 0b10000001, 0b01000010, 0b00100100, 0b00011000, 0b00100100, 0b01000010, 0 },
{ 0b10000000, 0b01000000, 0b00100000, 0b00010000, 0b00000100, 0b00000010, 0b00000001, 0b10000001, 0b01000001, 0b00100001, 0b00010001, 0b00001001, 0b00000101, 0b00000011, 0b10000011, 0b01000011, 0b00100011, 0b00010011, 0b00001011, 0b00000111, 0b10000111, 0b01000111, 0b00100111, 0b00010111, 0b00001111, 0b10001111, 0b01001111, 0b00101111, 0b00011111, 0b10011111, 0b01011111, 0b00111111, 0b10111111, 0b01111111, 0b11111111, 0 },
0 // last pattern must be empty
} ;
/*
* configuration structure definition
*/
typedef struct
{
uchar magic[32] ; // magic string
uchar learnFlags ; // 0x0f when all of the 4 keywords are trained
uchar dc[NB_LEDS] ; // duty cycle to blink status LEDs
uchar speed ; // animation speed
uchar anim ; // animation number
} CONF_STRUCT ;
CONF_STRUCT confStruct ; // configuration structure
const uchar *magicString = "www.micro-examples.com" ; // magic string
PARAMETERPASS res ; // parameters passing structure, needed by Fluentchip functions
/*
* messages sound index table
*/
const uchar msgTbl[NB_CMD] =
{
SND_change_animation,
SND_slow_animation,
SND_speed_animation,
SND_stop_animation
} ;
uchar cnt ; // status LEDs duty cycle counter
/********************************************
* ISR : TIMER 3 overflow
********************************************/
#pragma interrupt 4 tmr3_isr // tmr3 isr is on vector #4
void tmr3_isr(void)
{
uchar i ;
uchar mask = 0b00000001 ; // LED status mask
if(shiftLed) // if animation enabled
{
speedCtr++ ; // increment prescaler
if(speedCtr >= confStruct.speed) // time has come ?
{
if(ledAnim[confStruct.anim][ledCtr] == 0) // check if last step is reached
{
ledCtr = 0 ; // back to start
}
SHOW_PORT = ledAnim[confStruct.anim][ledCtr++] ; // load animation step
speedCtr = 0 ; // reset prescaler
}
}
cnt++ ; // increment duty cycle counter
cnt &= 15 ; // only 16 steps
for(i = 0 ; i < NB_LEDS ; i++) // for all status LEDs
{
if(confStruct.dc[i] > cnt) // light the LED depending on its duty cycle
{
STATUS_PORT |= mask ; // on
}
else
{
STATUS_PORT &= mask ^ 0xff ; // off
}
mask <<= 1 ; // next LED
}
irq = ~T3_IRQ ; // clear tm3 irq flag
}
/****************************************
* FUNCTIONS
****************************************/
/*
* write configuration structure to EEPROM
*/
void writeConfig(uchar clear)
{
uchar i ;
uchar *ptr = (uchar *)&confStruct ; // get pointer
if(clear) // clear before saving ?
{
memset(&confStruct, 0, sizeof(CONF_STRUCT)) ; // clear structure
confStruct.speed = MAX_SPEED / 2 ; // set default animation speed
}
strcpy(confStruct.magic, magicString) ; // set magic string
for(i = 0 ; i < sizeof(CONF_STRUCT) ; i++) // write all bytes
{
_SeepWriteByte(i, *ptr++) ;
}
}
/*
* read confguration structure from EEPROM
*/
void readConfig()
{
uchar i ;
uchar *ptr = (uchar *)&confStruct ; // get pointer
for(i = 0 ; i < sizeof(CONF_STRUCT) ; i++) // read all bytes
{
*ptr++ = _SeepReadByte(i) ;
}
if(strcmp(confStruct.magic, magicString) != 0) // check magic string
{
/*
* bad magic string : the EEPROM content does not belong to us, just ignore it
*/
writeConfig(1) ;
}
}
/*
* learn a new keyword for slot #slot
*/
void learnWord(char slot)
{
uchar retry = MAX_RETRY ; // number of retries before giving up
uchar lfMask ; // learn flag mask
uchar err = 0 ; // error counter
confStruct.dc[slot] = 7 ; // blink LED
lfMask = 1 << slot ; // shift slot number to get mask
/*
* prompt user to speak
*/
_PlaySnd(SND_say_keyword, (long)&SNDTBL_LEDLIGHTSHOW, SX_FULL_VOL) ;
_PlaySnd(msgTbl[slot], (long)&SNDTBL_LEDLIGHTSHOW, SX_FULL_VOL) ;
_PutTmpltListBase(firstTmplt) ; // define template start
switch(_MakeTmpltWs(SETUP_TIMEOUT, 2, 2)) // record keyword, first time
{
case ERR_OK: // record is sucessful
_PutTmplt(slot) ; // save pattern in #slot number
do
{
/*
* prompt user to repeat the keyword
*/
_PlaySnd(SND_repeat, (long)&SNDTBL_LEDLIGHTSHOW, SX_FULL_VOL) ;
confStruct.dc[slot] = 11 ; // change LED blinking duty cycle
switch(_MakeTmpltWs(SETUP_TIMEOUT, 2, 2)) // record keyword again
{
case ERR_OK: // new record is successful
_GetTmplt(slot) ; // read the previous template into internal memory
_PutTmplt(slot) ; // put the new template to external memory,
// so that successive tries are made with last records
switch(_TrainSd(slot, SD_DEF_LEVEL, 12, &res)) // compare & average templates
{
case ERR_OK: // training is successful
_PutTmplt(slot) ; // store the averaged template to the set #slot
retry = 0 ; // no retry needed
err = 0 ; // no error
break;
default: // training is not successful
err++ ; // increment error counter
retry-- ; // one try less
}
break ;
default: // record is not successful
retry = 0 ; // no other try
err++ ; // set error flag
}
}
while(retry) ; // loop if needed
break;
default: // first record is not successful
err++ ; // increment error counter
retry = 0 ; // no other try
}
if(err) // if an error occured
{
confStruct.dc[slot] = 0 ; // clear keyword LED
confStruct.dc[STATUS_LED] = 0 ; // clear trained status LED
_PlaySnd(SND_try_again, (long)&SNDTBL_LEDLIGHTSHOW, SX_FULL_VOL) ; // play the sound "try again"
}
else // learning is successful
{
confStruct.learnFlags |= lfMask ; // set keyword flag in learnFlags
confStruct.dc[slot] = 255 ; // light keyword LED
_PlaySnd(SND_thank_you, (long)&SNDTBL_LEDLIGHTSHOW, SX_FULL_VOL) ; // play the sound "thank you"
if(confStruct.learnFlags == 0x0f) // check for all keywords to be ready
{
confStruct.dc[STATUS_LED] = 255 ; // yes, light trained status LED
_PlaySnd(SND_ready, (long)&SNDTBL_LEDLIGHTSHOW, SX_FULL_VOL) ; // play the sound "ready"
}
else
{
confStruct.dc[STATUS_LED] = 0 ; // not fully trained, clear the status LED
}
}
writeConfig(0) ; // save to EEPROM
}
/*
* voice controled LED light show
*/
void recognizeWord(void)
{
uchar ret ; // recognition return code
if((confStruct.learnFlags & 0x0f) != 0x0f) // check if all keywords are trained
{
_PlaySnd(SND_not_trained, (long)&SNDTBL_LEDLIGHTSHOW, SX_FULL_VOL) ; // no, play "not trained" sound
return ; // return to caller
}
confStruct.dc[STATUS_LED] = 7 ; // blink status LED
shiftLed = 1 ; // enable animation
_PlaySnd(SND_listening, (long)&SNDTBL_LEDLIGHTSHOW, SX_FULL_VOL) ; // play "listening" sound
_PutTmpltListBase(firstTmplt); // define template start
do
{
ret = _RecogSd(NB_CMD, SD_DEF_LEVEL, LONG_TIMEOUT, 2, 2, &res); // record and compare to the four templates
switch(ret) // test return code
{
case ERR_OK: // a pattern is recognized
switch(res.pp_b) // best pattern number is in pp_b struct member of res
{
case 0: // pattern is keyword to change the animation
confStruct.anim++ ; // next animation
if(ledAnim[confStruct.anim][0] == 0)
{
confStruct.anim = 0 ; // back to first animation
}
ledCtr = 0 ; // first LED pattern
break ;
case 1: // pattern is keyword to slow the animation
if(confStruct.speed < MAX_SPEED)
{
confStruct.speed += 2 ; // increment scaler
}
break ;
case 2: // pattern is keyword to speed the animaition
if(confStruct.speed > 1)
{
confStruct.speed -= 2 ; // decrement scaler
}
break ;
case 3: shiftLed = 0 ; break ; // patter is keyword to stop the animation
}
_PlaySnd(SND_ok, (long)&SNDTBL_LEDLIGHTSHOW, SX_FULL_VOL) ; // play "ok" sound
writeConfig(0) ; // store configuration to EEPROM
break;
case ERR_DATACOL_TIMEOUT: // just loop on timeout
break ;
default: // an error has occured
_PlaySnd(SND_error, (long)&SNDTBL_LEDLIGHTSHOW, SX_FULL_VOL) ; // play "error" sound
break ;
}
}
while(ret || (res.pp_b != 3)) ; // loop if an error occured, or if exit has not been requested
SHOW_PORT = 0 ; // turn off LEDS animation
confStruct.dc[STATUS_LED] = 255 ; // turn on status LED
}
/*
* main loop
*/
void main(void)
{
uchar btn ; // button
/*
* I/O configuration, see RSC4128 datasheet
*/
p0ctla &= 0b10010000 ; // full port 0 as input, except EEPROM I²C lines
p0ctlb &= 0b10010000 ;
p0out = 0 ;
p0in = 0 ;
p1ctla = 0xff ; // full port 1 as output
p1ctlb = 0xff ;
p1out = 0 ;
p1in = 0 ;
p2ctla = 0xff ; // full port 2 as output
p2ctlb = 0xff ;
p2out = 0 ;
p2in = 0 ;
firstTmplt = BASE_TMPLT ; // template offset is constant because we are using external EEPROM
if(BUTTON_PORT == BUTTON_RECOGNIZE)
{
writeConfig(1) ;
}
else
{
readConfig() ; // read configuration
}
_InitCollection() ; // initialize system for audio block collection
/*
* timer 3 configuration
*/
t3Ctl = 0x87 ; // start timer 3 with prescaler
t3r = 0 ; // no reload value
irq = ~T3_IRQ ; // clear any pending timer 3 IRQ
imr = T3_IRQ ; // enable timer 3 interrupt
_sti_() ; // interrupt enable
_PlaySnd(SND_welcome, (long)&SNDTBL_LEDLIGHTSHOW, SX_FULL_VOL) ; // play the "welcome" sound
for(;;) // forever loop
{
if((btn = BUTTON_PORT) != BUTTON_MASK) // a key is pressed ?
{
while(BUTTON_PORT != BUTTON_MASK) ; // yes, wait for release
switch(btn) // test button
{
case BUTTON_LEARN_CHANGE : learnWord(0) ; break ; // learn keyword #1
case BUTTON_LEARN_SLOW : learnWord(1) ; break ; // learn keyword #2
case BUTTON_LEARN_FAST : learnWord(2) ; break ; // learn keyword #3
case BUTTON_LEARN_STOP : learnWord(3) ; break ; // learn keyword #4
case BUTTON_RECOGNIZE : recognizeWord() ; break ; // start keyword recognition for LED animation control
}
}
}
} |